
To test the stereo camera setup I created, I used a tiny tree I build out of left over 3D print scaffolding.

Using the DragonFrame software to control the cameras, I made a single frame test recording. Single frame in this case means two images, this being a stereo setup. When I overlaid the two images directly (using GIMP) it showed there was quite an offset between the cameras
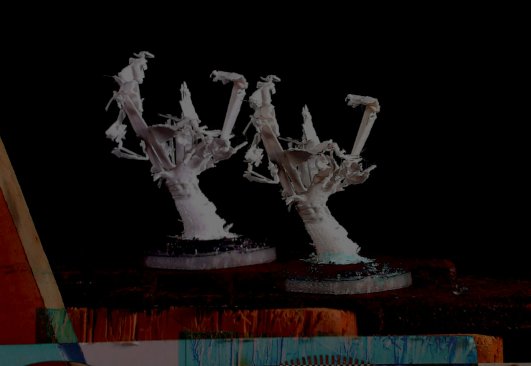
The horizontal offset is to be expected, to correct that I would have to make the cameras “toe in” and not simply both look straight forward.
Even though I made sure the white balance for both cameras was on the exact same value, the color was slightly off. That is easy to fix in post, I now know that I will have to shoot a white reference for each take.
I created an anaglyph image from the image pair using the compositor in Blender.
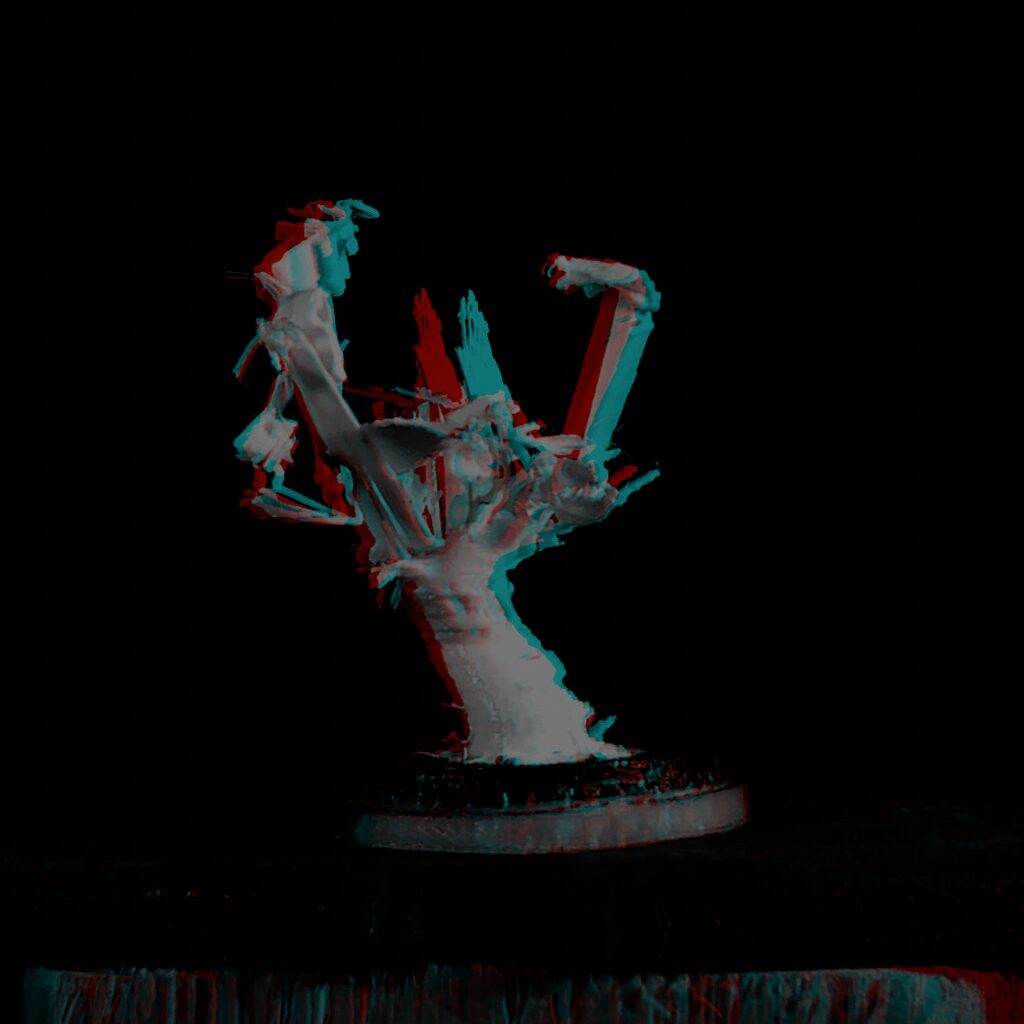
The technique works, sort of. The object is too small for my stereo camera setup. The depth is a bit too strong. The lenses would need to be even closer together, which is physically not possible. But that is why we do tests, to see what works and what does not. As proof on concept, I am pretty happy with the result!